预计阅读时间: 36 分钟
一个简短的、直接的现代处理器微架构设计介绍。
当今的机器实在是非常原始,它们只能理解区区几个简单的指令,比如“向左”、“向右”和“生产汽车”。
Today’s robots are very primitive, capable of understanding only a few simple instructions such as ‘go left’, ‘go right’ and ‘build car’.
John Thomas Sladek
警告:本文旨在以非正式和风趣的语言讲述严肃的科学。
警告2:长文!预计阅读时间36分钟。
本文主要向计算机专业的低年级学生和对现代处理器结构感兴趣的读者介绍有关处理器微架构的一些概念。具体来说,有以下几个方面:
- 流水线(超标量执行、乱序执行、超长字指令、分支预测)
- 多核和超线程(同步超线程 SMT)
- SIMD指令集(SSE、AVS、NEON、SVE)
- 缓存和缓存机制
听起来内容很深奥,但是,不要害怕!这篇文章将带你快速地了解这些看似只有处理器设计从业者或者是体系结构专家才能了解的东西。也许你很快就可以和你的同学/朋友吹牛了🤣。
超10G!
超10G!全人类感谢你!
——某up
主频越高,CPU性能越好,这似乎是很多人的误区(不包括以上引用的up主),但是,从上古时期开始,CPU的性能和主频就没有直接关系。那么这个刻板印象是从哪里来的呢?🤔
让我们来看看一些上古(上世纪90年代末)的处理器数据…
| 主频 | 型号 | SPECint95 | SPECfp95 |
| 195 MHz | MIPS R10000 | 11.0 | 17.0 |
| 400 MHz | Alpha 21164 | 12.3 | 17.2 |
| 300 MHz | UltraSPARC | 12.1 | 15.5 |
| 300 MHz | Pentium II | 11.6 | 8.8 |
| 300 MHz | PowerPC G3 | 14.8 | 11.4 |
| 135 MHz | POWER2 | 6.2 | 17.6 |
SPEC是一个当年常用的性能测试工具,乔布斯在宣布苹果的Macbook由IBM PowerPC平台转向Intel的酷睿平台的时候就在发布会上展示了SPEC的性能提升。
从表中可以看到,为什么300MHz的处理器有这么不同的性能差异?为什么低主频的CPU反而吊打高主频的?
什么?你说这都是上古的数据?那就来一个最近的:
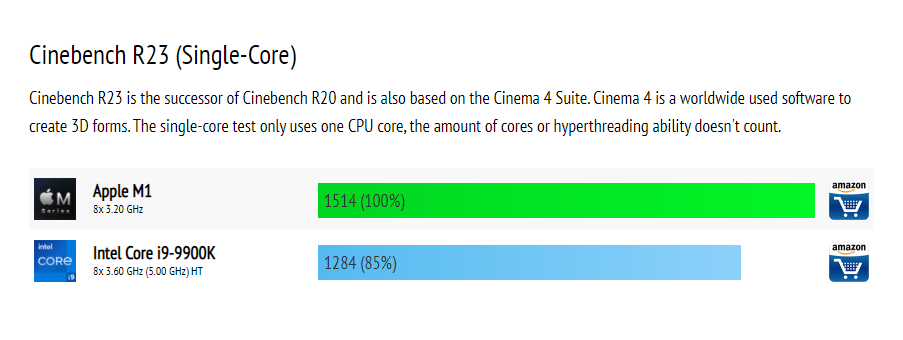
超到一半人类感谢你(5GHz)的Intel i9-9900K居然被M1吊打?
是的,你没有看错,这就说明显然除了主频以外还有一些什么东西,那就是——
流水线和指令级并行
指令在处理器中是一个接一个的执行的,对吗?不完全对。这样的说法可能是直观的,但是并不是事实,实际上,从80年代开始,CPU就不再是完全顺序执行每个指令了。现代处理器可以同时执行不同指令的不同阶段,甚至有的处理器也可以完全同时地执行多个指令。
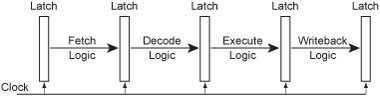
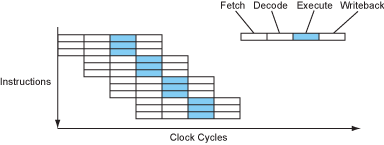
让我们来看一看一个简单的四级流水线是怎么构成的。指令被分成四个部分:取指、译码、执行和写回。
如果CPU完全顺序执行,那么每条指令需要花费4个周期才能执行完毕,IPC=0.25(Instruction per cycle)。当然,古老一点的时期更喜欢使用CPI,因为当时的处理器普遍不能做到每周期执行一条指令。但是现在时代变了,你能接触到的任何一个桌面级处理器都可以在一个周期内执行一条、两条甚至是三条指令。
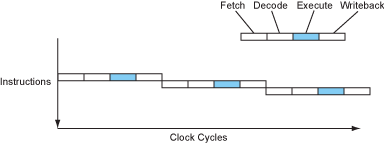
正如你所看到的,实际上CPU内负责运算的组件(ALU)十分的悠闲,甚至只有25%的时间在干活。什么?怎么压榨ALU?我看你很有资本家的天赋嘛…
好吧,现代处理器确实有手段压榨这些ALU(对,现代处理器也不止一个ALU)。一个很符合直觉的想法就是既然大部分的阶段CPU都不是完全占用的,那么将这些阶段重叠起来就好了。确实,现代处理器就是这么干的。
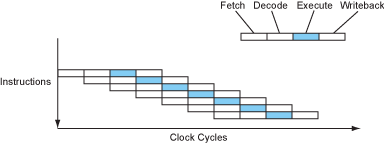
现在我们的处理器大多数时候一个周期可以执行一条指令了,看起来不错!这已经是在没有增加主频的情况下达到四倍的加速了。
从硬件的角度来看,每级流水线都是由该级的逻辑模块构成的,CPU时钟就像一个水泵,每次把信号(或者也可以说是数据)从一级泵到下一级,就像这样:
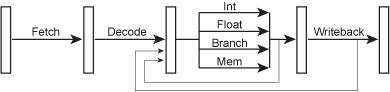
事实上,现代处理器除了以上这样简单的结构,首先还有很多额外的ALU,比如整数乘法、加法、位运算、浮点数的各种运算等等,几乎每种常用的运算都有至少一个ALU。其次,如果前一条指令的结果就是下一条指令的操作数,那么为什么还要把数据写回寄存器呢?因此就出现了Bypass(前递)通路,用于在这种情况下直接将数据重新送到运算器的输入端口。综合起来,详细一点的流水线微架构应该长这样:
更深的流水线——超级流水线!
自从CPU主频由于某种原因(某种神秘力量?😈)很多年没有大的进步以来(对的,超频榜第一还是AMD的推土机架构CPU),流水线的设计几乎成为了CPU厂商的竞赛主场。加深的流水线首先可以继续增大实际的IPC(理论上限仍是1),其次可以避免流水线对时序的影响。这与晶体管的特性有关,感兴趣的读者可以上网搜一搜多级流水线结构为什么会影响时序和最终综合出的主频。
在2000-2010年间,这种竞赛达到了最高峰,那时候的处理器甚至可以有高达31级的流水线。但是超深的流水线带来的是结构上的复杂和显著增大的动态调度模块设计难度,因此,从那以后就没有再出现过使用这么多级流水线的CPU了。作为对比,目前(2021年)的处理器多半视应用场景的不同采用10-20级不等的流水线。
x86和其它CISC处理器通常有着更深的流水线,因为他们在取指和译码阶段有数倍的任务要做,所以通常使用更深的流水线来避免这一阶段带来的性能损耗。
多发射——超标量处理器
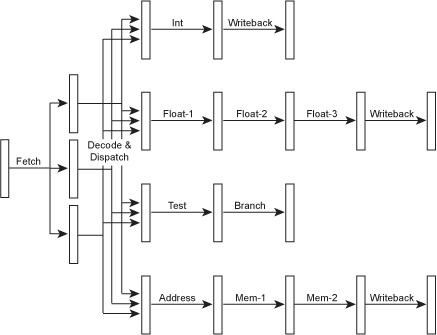
既然整数的运算器和浮点数的运算器以及其它的的一些ALU互相之间都是没有依赖的,自己做自己的事情,那为什么不进一步压榨它们,让他们尽可能地一起忙起来呢?这就出现了多发射和超标量处理器。多发射的意思是处理器每个周期可以“发射”多于一条的指令,比如浮点运算和整数运算的指令就可以同时执行且互不干扰。为了完成这一点,取指和译码阶段的逻辑必须加强,这就出现了一个叫做调度器或者分发器的结构,就像这样:
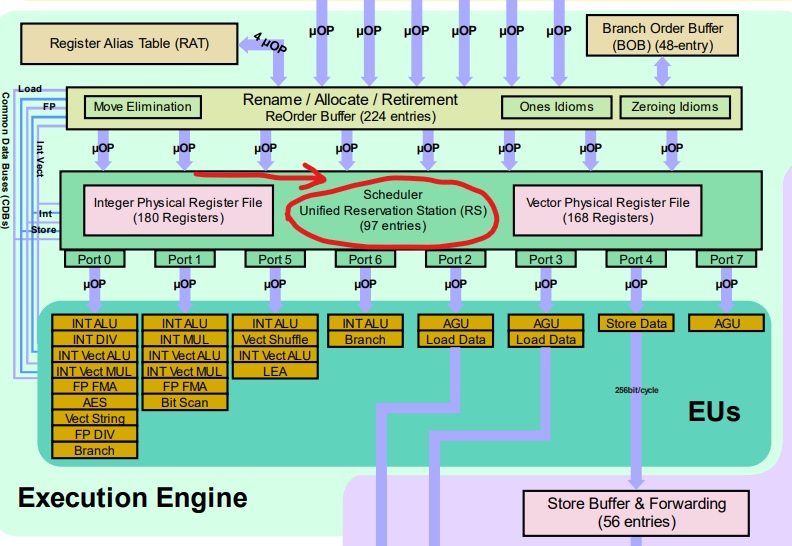
或者我们来看一张实际的Intel Skylake架构的调度器,图中红圈的就是负责每周期“发射”指令的调度器。
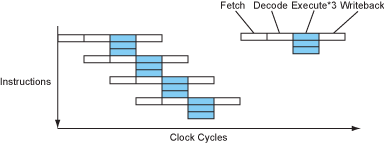
当然,现在不同的运算有了不同的“数据通路”,经过的运算器也不同。因为不同的运算器内部可能也分不同的执行阶段,于是不同的指令也就有了不同的流水线深度:简单的指令执行得快一些,复杂的指令执行得慢一些,这样可以降低简单指令的延迟(我们很快就会涉及到)。某些指令(比如除法)可能相当耗时,可能需要数十个周期才能返回,因此在编译器设计中,这些因素就变得格外重要了。有兴趣的读者可以思考梅森素数在这里的妙用。
超标量处理器中指令流可能是这个样子的:
现代处理器一般都有相当多的发射端口,比如上面提到的Intel Skylake是八发射的结构,苹果的M1也是八发射的,ARM最新发布的N1则是16发射的处理器。
显式并行——超长指令集
当兼容性不成问题的时候(很不幸,很少有这种时候),我们可以设计一种指令集,显式地指出某些指令是可以被并行执行的,这样就可以避免在译码时进行繁复的依赖检验。这样理论上可以使处理器的硬件设计变得更加简单、小巧,也更容易取得更高的主频。
这种类型的指令集中,“指令”实际上是“一组子指令”,这使得它们拥有非常多的指令,进而每个指令都很长,例如128bits,这就是超长指令集(VLIW)这个名字的来源。
超长指令集处理器的指令流和超标量处理器的指令流十分的类似,只是省去了繁杂的取指和译码阶段,像这样:
除了硬件结构,超长指令集处理器和超标量处理器十分的相似,尤其是从编译器的角度来看(我们很快也会谈到)。
但是,超长指令集处理器通常被设计成不检查依赖的,这就使得它们必须依赖编译器的魔法才能保证结果的正确,而且,如果发生了缓存缺失,那它们不得不整个处理器都停下来,而不是仅仅停止遇到缓存缺失问题的那一条指令。编译器会在指令之间插入“nops”(no operations)——即空指令,以保证有数据依赖的指令能够正确地执行。这无疑增加了编译器的设计难度和编译所需的时间,但是这同时节省了宝贵的处理器片上资源,通常也能有略好的性能。
现在仍在生产的现代处理器中并没有采用VLIW指令集的处理器。Intel曾经大力推行过的IA-64架构就是一个超长指令集(VLIW)架构,由此设计的“Itanium”系列处理器在当时也被认为是x86的继承者,但是由于市场对这个新架构并不感冒,所以最终这个系列没有发展下去。现代硬件加速最火热的方向是GPU,其实GPU也可以看作是一种VLIW架构的的处理器,只不过它将VLIW架构更进一步,使用“核函数”代替指令,大大增加了这种体系结构的可扩展性,有兴趣的读者也可以了解相关方面的内容。
数据依赖和延迟
我们在流水线和多发射这条路上能走多远?既然多发射和多级流水线这么好,那为什么不做出50级流水线、30发射的处理器?我们来讨论以下两条指令:
a = b * c; d = a + 1;
第二条指令依赖于第一条指令——处理器在完成前一条指令之前无法执行下一条指令。这是一个很严重的问题,这样一来,多发射就没有用武之地了,因为无论你制造出了多少发射的处理器,这两条指令还是只能顺序地执行(除去取指等部分)。有关依赖和消除的问题我们会在后面讨论。
如果第一条指令是一个简单的加法指令,那么加法器在执行完毕后可以通过Bypass通路(前递)将数据传回ALU的输入端口并继续计算,这样流水线才可以正常工作。但是很不幸,第一条指令是一个需要多周期才能完成的乘法(目前的大多数CPU没有使用单周期乘法,因为复杂的逻辑通常会损害主频),这样的话,处理器为了等待第一条指令完成就不得不往流水线中加入若干“气泡”也就是类似于“nops”的指令来保证运算的正确性。
一条指令到达运算器的输入端口和执行结果可用之间需要耗费的CPU周期称为指令的延迟。流水线越深,指令的延迟就越高,所以更深的流水线如果无法有效地填满,那么结果只能是很高的指令延迟而无益于处理器的性能。
从编译器的角度(考虑了Bypass,硬件工程师口中的延迟通常不包括Bypass),现代处理器的指令延迟通常是:整数乘加和位操作1周期,浮点数乘加2-6周期不等,sincos这种复杂指令10+周期,最后是可能长达30-50周期的除法。
访存操作的延迟也是一个很麻烦的问题,因为它们通常是每条指令最开始执行的步骤,这使得它们造成的延迟很难用别的方式补偿。除此以外,他们的延迟也很难预测,因为延迟很大程度上取决于缓存是否命中,而缓存是动态调度的(我们很快也会讲到)。
分支和分支预测
另外一个流水线的重要问题就是分支,我们来看一看接下来的一段程序:
if (a > 7) {
b = c;
} else {
b = d;
}
编译成的汇编程序将会是这样:
cmp a, 7 ; a > 7 ?
ble L1
mov c, b ; b = c
br L2
L1: mov d, b ; b = d
L2: ...
现在想象一个流水线处理器来执行这一段程序。当处理器执行到第二行,也就是第二行的跳转命令到达处理器的执行器的时候,它肯定已经把后面的所有指令都提前从内存中取出存并完成了译码工作了。但是,究竟跳转的是哪一条指令?是3,4行还是第5行?在跳转命令到达执行器之前我们并不知道应该跳转到哪里。在一个深流水线的处理器中,似乎不得不停下来等待这个跳转命令,再重新往流水线中填入新的指令。这当然是不可接受的,程序中,尤其是循环时,分支跳转的命令占比很大,如果每次都等待这条命令的完成,那么我们的流水线就不得不经常地暂停,而我们通过流水线取得的性能提升也将不复存在。
于是现代处理器会做出猜测。什么?处理器竟然靠猜,我还以为发达的处理器设计行业能给出更好的解决方案呢!先不要着急,实际上程序中分支的跳转是有规律的,现代处理器分支预测的准确度通常能达到99%以上(虽然分支预测也是Intel的spectre和meltdown漏洞的来源👿)。
处理器会沿着预测的分支执行下去,这样一来,我们的处理器就可以保持流水线和运算器的占用,并高速地执行下去。当然,执行的结果还不能作为最终的结果,只有在分支跳转命令的结果出来以后,预测正确的结果才会被写回(commit或retire)。那猜错了怎么办?那处理器也没有好的办法,只能重新从另一个分支开始进入流水线,在高度流水化的现代处理器里,分支预测错误的代价(分支预测的错误惩罚)是相当高昂的,通常会达到数十个CPU周期。
这里的关键在于,处理器如何做出预测。通常而言,分支预测分为静态和动态两种。
静态分支预测即处理器做出的猜测与运行时的状态无关,而对跳转的优化由编译器完成。静态预测通常有一律跳或者往后跳预测不跳,往前跳转则预测跳。后者通常效果更好,原因是循环中一般会有大量向前的跳转指令。
动态分支预测则是根据跳转指令的历史决定是否跳转。一个最简单的动态分支预测器就是2位饱和计数器,它是一个四个状态的状态机,特点是只有连续两次预测错误才会更改预测方向。它已经能在大部分场合下取得90%以上的预测正确率。

这种预测器在交替出现跳和不跳的分支指令时表现不佳,于是人们又发明了n级自适应分支预测器,它的原理与2位饱和计数器类似,不过它能够记住过去n次的历史,在重复的跳转模式中表现优异。
不幸的是,分支预测是各个CPU厂商的核心竞争力之一,大多数优秀的分支预测技术也是重要的商业机密,于是在这个方面并没有太多可以深入的。Cloudflare最近发布了一篇博文深入测试了x86和ARM的M1上分支预测器的特征,有兴趣的读者可以看看。
去除分支语句
由于分支这实在是处理器不喜欢的东西,于是人们便想要尽量减少分支语句的使用。而以下这种情况很常见,在求取最大最小值或者是条件赋值的时候经常被使用(第1,2行):
cmp a, 7 ; a > 7 ? mov c, b ; b = c cmovle d, b ; if le, then b = d
于是人们就设计出了第3行这种指令。这样的指令是在特定条件下将d的值赋给b,而并不引入分支,只需要在条件不满足的时候不进行写回(commit/retire)就可以了。这种指令被称为条件转移指令,编译器中经常使用这种trick来避免进行跳转。
我们古老的x86架构一开始并不支持条件转移指令,MIPS、SPARC也不例外,而Alpha架构从设计之初就考虑了这类指令(RISC-V这样的新指令集当然也有)。ARM则是第一个采用全可预测指令的指令集,这一点很有趣,因为早期的ARM处理器通常采用很浅的流水线,分支预测的惩罚很小。
指令调度、寄存器重命名和乱序执行
如果分支和长延迟的指令会带来流水线气泡,那么能不能把这些气泡占据的处理器时间用来干有用的事情呢?为了达到这个目的,就需要引入乱序执行。乱序执行允许处理器将部分指令的顺序打乱,在执行长延迟指令的同时执行一些别的指令。
历史上有两种方式来达到乱序执行的目的:软件的和硬件的。
软件的途径很好理解,就是通过编译器与体系结构的强耦合,在编译阶段就生成好无相互依赖,易于处理器调度的指令。在编译阶段进行指令重排又被称为静态指令调度,优点是软件实现可以更灵活(众所周知,软件什么都能干),通常软件也可以有足够的存储空间来分析整个程序,因此可以获得更优的指令排布。当然缺点也是显而易见的,由于编译器需要深入地了解体系结构相关的信息,如指令延迟和分支预测惩罚等,对可移植性造成了很大的困难。因此现代处理器更加常用的是硬件方式。
硬件方式主要是通过寄存器重命名来消除读—读和写—写假依赖。寄存器重命名就是对不同指令调用的相同寄存器使用不同的物理硬件存储,在写回阶段再对这些指令和寄存器进行排序,这样这些假依赖就不再是产生流水线气泡的原因了。注意,写—读依赖是真正的数据依赖,虽然像前递这样的技术可以降低延迟,但是并没有能够解决这种依赖的办法。现代处理器中也并非仅仅只有如16个通用寄存器和32个浮点寄存器等等,通常都有成百上千的物理寄存器在CPU的片上。寄存器重命名的算法最有名的便是Tomasulo算法,有兴趣的读者可以搜索一下。
硬件方式的优点在于降低了编译器的体系结构耦合度,提高了软件编写的便捷性,通常硬件乱序执行的效果也不必软件的差。而缺点在于依赖分析和寄存器重命名都需要耗费宝贵的片上空间和电力,但对于性能的提升却没有相应的大。因此,在一些更加关注低功耗和成本的CPU中,会采用顺序执行,如ARM的低功耗产品线,Intel Atom等。
多核和超线程
我们之前讨论了各种指令集并行的方法,而很多时候它们的效果并不是很好,因为相当一部分的程序没有提供细粒度的并行。因此,制造更“宽”更“深”的处理器效果相当有限。
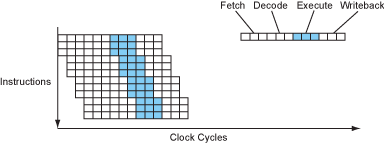
但是CPU的设计者又想了,如果本程序中没有足够并行的没有相互依赖的指令,那么不同的程序之间肯定是没有数据依赖的(指令级数据依赖),那么在同一个物理核心上同时运行两个线程,互相填补流水线的空缺,岂不美哉?这就叫做同步多线程(SMT),它提供了线程级的并行化。这种技术对于CPU以外的世界来说是透明的,就仿佛真的CPU数量多了一倍似的,因此现在人们也常说虚拟核心。
从硬件角度来说,同步多线程的实现需要将所有与运行状态有关的结构数量都翻倍,比如寄存器,PC计数器,MMU和TLB等等。幸运的是,这些结构并不是CPU的主要部分,最复杂的译码和分发器,运算器和缓存都是在两个线程之间共享的。
当然,真实的性能不可能翻倍,理论上限还是取决于运算器的数量,同步多线程只是能够将运算器更好地利用而已。因此在例如游戏画面生成这样地并行度本来就很高地任务中,SMT几乎没有任何地效果,反而因为偶尔地线程切换而带来一定地性能损失。
SMT处理器的指令流看起来大概是这样的:

太好了!现在我们有了填满哪些流水线气泡的方法了,而且绝无任何风险。所以,30发射的处理器我们来啦!对吗?不幸的是,不对。
虽然IBM曾在它的产品中使用过8线程的核心,但是很快我们就会看到,现代处理器的瓶颈早已不单单是CPU本身了,访存延迟和带宽都成为了更加迫切需要解决的问题。而同时使用8个MMU,8个PC,8个TLB怎么看也不是一个缓存友好的做法。因此,现在已经很少听到有多于一个核心两个线程的处理器了。
数据并行——SIMD指令集
除了指令级并行和超线程,在现代处理器中还有一种并行化的设计——数据并行化。数据并行化的思想是将同一条指令不同数据进行并行化,而不是对不同的指令进行并行。所以使用数据并行化的指令集通常又称为SIMD指令集(单指令多数据),也有称为向量指令集的。
在超级计算机和高性能计算领域,SIMD指令集被大量的使用,因为通常科学计算会处理极多的数据而对于每个数据的操作并不复杂,而且基本没有相互依赖性。在现代的个人计算机中,SIMD指令集也大量的存在,哪怕是最为廉价的手机中,SIMD指令集也有它的身影。
SIMD指令集的工作原理就像下图所示的那样:
从硬件的角度来说,实现这样的并行化并不难,这就像每次都执行同一个指令的超标量处理器,CPU设计厂商唯一需要做的就是增大寄存器的容量而已。Intel在过去20年正在不断地增大可以并行的向量长度,从SSE的128bits到AVX512的512bits。而ARM从ARMv8a开始便从NEON的128bits飞跃到了SVE的2048bits长度,甚至还支持可变长度。
现代的x86-64处理器都支持SSE指令集,所以现在的编译器如果编译64位平台的目标文件,会自动的将SSE指令集加入用于优化。由于SIMD指令集发展迅速,不少指令的延迟甚至和传统的标量命令不相上下,而且SSE指令集也拥有操作单个操作数的指令,现代编译器在默认情况下对于单个浮点数的操作也会使用SSE指令集而不是使用传统的x87浮点指令。另外,几乎所有的体系结构都拥有自己的SIMD指令集。
像渲染画面或者科学计算这种简单而重复的任务很适合SIMD指令集,事实上,GPU的工作原理也与SIMD类似。但不幸的是,在大多数普通(没有经过特别的思考而写出的)代码中,SIMD指令集并不能被很好的应用。现代编译器全部都有不同程度的循环自动向量化(使用SIMD指令集),但是当程序的编写者没有很好地考虑数据的依赖性和内存布局(马上就会谈到)时,编译器往往不能对代码进行什么优化。而幸运的是,通常通过简单的改动,就可以编译器明白某些循环是可以被优化的,进而大幅的提升程序的运行速度。
内存和内存墙
现代处理器实在是太快了,以至于它们大多数时候都在等待内存响应,而不是干正事。
——佚名(忘记出处了)
自从计算机发明以来,处理器的发展速度远远超过存储的发展速度,以下是一个对比图:
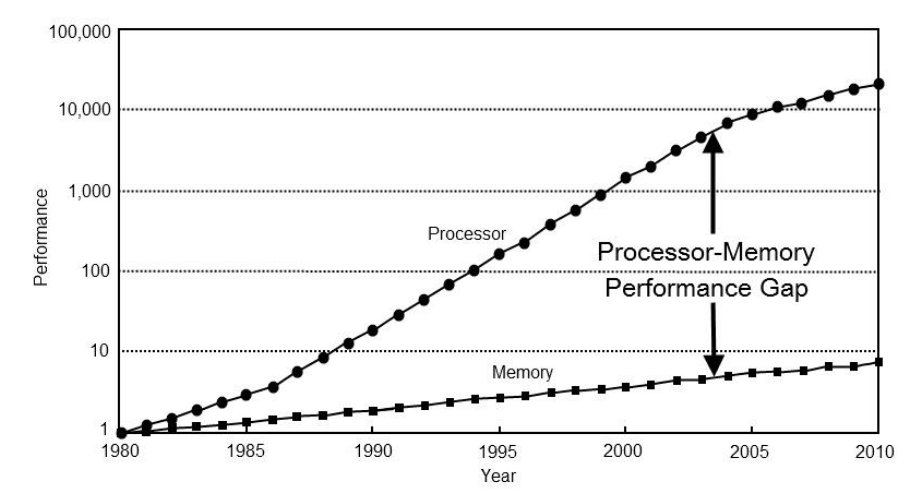
对于现代处理器来说,内存访问非常的昂贵。
- 在1980年,CPU访问一次内存通常只需要一个周期。
- 在2021年,CPU访问内存大约需要300-500个周期。
当我们考虑到,我们在CPU上使用了那么多种手段来压榨运算器,使IPC能够突破1,这样来看,内存就更慢了。以下是一个表格,展示了如果处理器周期看作是1秒,访问其它的存储器需要的时间。
| 事件 | 延迟 | 等效延迟 |
| CPU周期 | 0.2ns | 1s |
| L1缓存访问 | 0.9ns | 4s |
| L2缓存访问 | 3ns | 15s |
| L3缓存访问 | 10ns | 50s |
| 内存访问 | 100ns | 8分钟 |
| 固态硬盘访问 | 10-100us | 15-150小时 |
| 机械硬盘访问 | 1-10ms | 2-18月 |
可以看到,现代CPU实在是太快了,程序编写者现在要比过去花费更多的精力来使他们的程序能够充分利用CPU的性能,而不是卡在内存操作上。
为了解决这个严重的问题,处理器设计者们也想出了办法,也就是上面的表格中已经出现了的缓存。80年代的CPU由于没有内存墙的问题,所以基本都没有设计缓存。而现代CPU通常而言都有高达三级的缓存(某些低功耗和移动端的CPU只有两级),理解这些缓存是怎么样工作的有利于程序设计者写出更快的程序。
缓存
Cache这个词读音和Cash(现金)一样,而不是kay-sh、ca-shay或者Cake!
我
现代处理器为了解决内存墙,使用多级的缓存来避免内存延迟的影响。一个典型的缓存结构是这样的:
| 等级 | 大小 | 延迟 | 物理位置 |
|---|---|---|---|
| L1 cache | 32 KB | 4 cycles | 每个核心内部 |
| L2 cache | 256 KB | 12 cycles | 每个die或每个核心 |
| L3 cache | 6 MB | ~21 cycles | 整个处理器共享或每die共享 |
| RAM | 4+ GB | ~117 cycles | 主板上的内存条上 |
令人高兴的是,现代处理器的缓存机制出奇的有效,L1缓存的命中率在大多数时候高达90%,这说明在大多数情况下内存访问的代价仅仅是几个周期而已。
缓存能够取得这么好的效果主要是因为程序具有很好的局部性。分为空间局部性和时间局部性。时间局部性说的是当程序访问一块内存时,很有可能接下来连续访问这一块内存。空间局部性是说程序访问一块内存,那么它很可能也许要访问附近的内存。为了利用好这样的局部性,内存中的数据是一块一块地从内存条上复制到缓存中的,这些快被称为缓存行。
从硬件的角度来说,缓存的工作原理和键值对表很类似。Key就是内存的地址,而Value则是对应的数据。事实上Key并不一定是完整的地址,通常是地址的高位一部分,而低位被用来索引缓存本身。用物理地址和虚拟地址来作为Key都是可行的,也各有好坏(就像所有的事情一样)。使用虚拟地址的缺点是进程的上下文切换需要刷新缓存,这非常昂贵。使用物理地址的缺点则是每次查缓存都需要先查页表。因此现代处理器通常采用虚拟地址作为缓存索引,而使用物理地址作为缓存行的标记。这样的方法又被称作“虚拟索引——物理标记”缓存。
缓存冲突和关联度
理想状态下,缓存应当保存最近最常使用的数据,但是对于CPU上的硬件缓存来说,有效维护使用状态的算法不能满足严格的延迟要求(例如Linux内核页缓存使用的LRU,有兴趣可以看我前面的文章Linux内核页面置换算法),也难以用硬件实现,所以通常处理器使用简单的方法:每一个缓存行直接对应内存的几个位置。由于对应的几个位置不太可能同时访问,因此缓存是有效的。
这样的做法非常快速(本来缓存的设计目的就是这样的),但是当程序的确不断地来回访问同一个缓存行对应的不同位置的时候,缓存控制单元不得不反复从内存中装载数据,非常耗时,这被称为缓存冲突。解决办法就是不限制每一个内存区域只对应一个缓存行,而是对应几个,这个几个就被称作是缓存关联度。
当然,最快的方法是每个内存区域对应一个缓存行,这被叫做直接映射缓存,而使用4个关联度的缓存被称作4通道关联缓存。内存可以装载到任意一个缓存行的缓存叫做全关联缓存。使用关联的缓存带来的好处是大大减少了缓存冲突而保持查询延迟在一个合理的范围内。这也是现代处理器通常使用的方法。
致谢
Modern Microprocessors: A 90-Minute Guide! 2016 By Jason Robert Carey Patterson
The compiler will optimize that away 2021 By RoyalSloth
The Intel Skylake Mobile and Desktop Launch, with Architecture Analysis 2015 By AnandTech
Skylake(Client) Microarchitecture 2020 By WikiChip
深入阅读
- 《深入理解计算机系统》(CSAPP)
- 《计算机体系结构:一种量化方法》
- 吹牛还是真牛?苹果M1全网最硬核评测(上) By 极客湾@bilibili.com

真不错,学习到了~
太强了
不错,很好的科普
挺好的科普,有一个疑问:
在多发射的超标量处理器中提到不同操作具有不同延迟,以及编译器可以发挥调度作用。那么梅森素数在这里会有什么作用呢?
早期由于乘法和除法的延迟都很高,使用只需要一个周期就可以完成的位运算和移位来计算余数是编译器常见的优化。梅森素数和2的幂是进行这样优化的基础。了解等价变化的方法可以看这一篇上古文章Modulus without Division, a tutorial
现在随着乘法的延迟降得很低,现代编译器大多使用乘法和移位来进行优化了。
Intel VTune性能分析工具仍然在使用CPI这个术语,而不是IRC。
cache的正确读音不应该是”擦车”吗(
学习了,我一个外行都大概看明白了
牛牛牛
TQL
文章的质量很高,点个赞👍